- Arduino Uno.
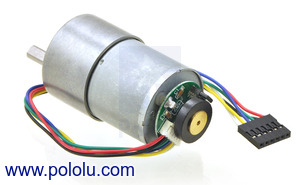
- Motor Faulhaber con reducción
- Modulo driver de motores L298n
- Protoboard
- 2 resistencias de 1K
- 4 resistencias de 10K
- 2 leds
- 1 resistencia de 120 ohms
y otras cosas como cables y una fuente de 12v. para el motor
Por supuesto tendrán que ver el vídeo para continuar
las conexiones son las siguientes:

Luego vamos a armar el siguiente circuito(serán 2 iguales, uno por cada canal):
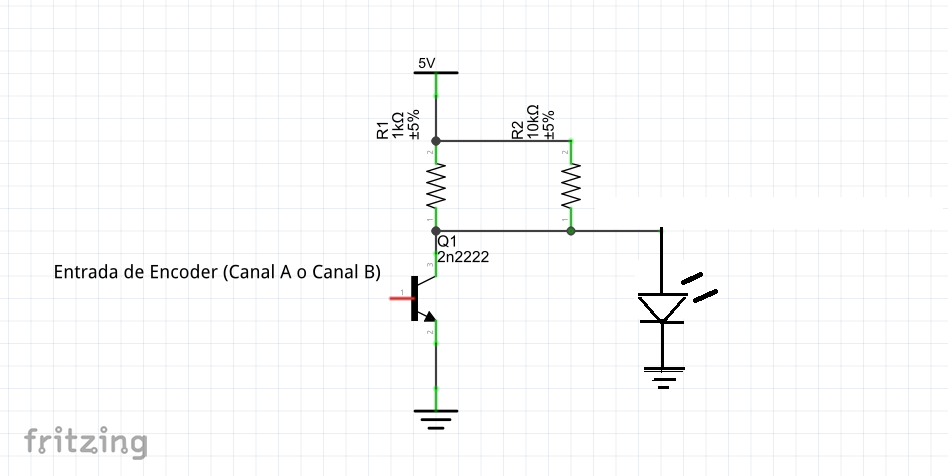
Con este circuito podremos ver si nuestro encoder esta en buen estado, cuando un sensor deja pasar la luz el led prenderá, por lo tanto a su salida tendremos una tensión de aproximadamente 5V.
Si ustedes tienen un motor Pololu de este tipo u otro que genere a la salidas del encoder 5v.
no sera necesario armar el circuito
solo tendrán que identificar la alimentación y la salida de ambos canales del encoder
una vez comprobado que el encoder funciona bien podremos pasar a conectarlo al arduino

2 de estos, 1 por cada canal


El módulo no recibirá alimentación de 5v. ya que usaremos el jumper para activar el regulador que trae integrado
digitalWriteFast.h que pueden descargar aquí,
En cuanto al código de ejemplo lo podrán descargar de aquí
Eso es todo, cualquier duda o queja no duden en comentar y recuerden apoyarme con su suscripción a mi canal de Youtube y a mi Blog, gracias.
hola ejecuto el programa pero tengo un problema en arduino me podrías ayudar:
ResponderEliminarC:\Users\Gateway\Documents\Arduino\libraries\digitalWriteFast/digitalWriteFast.h:25:0: warning: "digitalPinToTimer" redefined [enabled by default]
#define digitalPinToTimer(P) \
^
In file included from sketch\EncoderOptico1.ino.cpp:1:0:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:171:0: note: this is the location of the previous definition
#define digitalPinToTimer(P) ( pgm_read_byte( digital_pin_to_timer_PGM + (P) ) )
Ya instalaste la librería?
EliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarya la instale y aun sigo con el mismo problema
EliminarExcelente post, muchísimas gracias !
ResponderEliminarExcelente post, muchísimas gracias !
ResponderEliminarTengo una pregunta, las otras dos salidas del encoder a donde se conectan?
ResponderEliminarDestornillé la placa y se observa algo parecido a un capacitor, aunque en la placa dice R1, se introduce a una cavidad del disipador, así que creo que es un termopar para sensar la temperatura del actuador.
EliminarEntonces no es necesario usar otro transistor? Veo que en tu diagrama tiene uno y en el material no lo nombras
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarPor favor me dices que problemas tengo. In function 'void setup()':
ResponderEliminarEncoderOptico1:34: error: 'Encoder1A' was not declared in this scope
exit status 1
'Encoder1A' was not declared in this scope
Ya instale la libreria
Gracias
Buen post, estaba buscando información de ese motor Faulhaber M124. ¿cuál es la tensión que arroja el encoder? porque mencionas que no la lee el arduino y por eso el circuito extra con transistor.
ResponderEliminarY el conteo es de 800 por la reducción del motor. Se puede mejorar la cantidad de conteos por vuelta si se hace interrupción en ambas salidas del encoder, empleando para esto el pin 3 de Arduino UNO.
Si activas las resistencias pull up no necesitas el circuito extra.
EliminarMe faltó mencionar que debes quitar las resistencias de 10K a 5V que van a los pines A y B del encoder. Simplemente conecta las salidas A y B al arduino y activa las pull up. (Poner en HIGH los pines de entrada).
ResponderEliminarSi empleas las 2 interrupciones el encoder da 3000 "ticks" por vuelta.
Hola, disculpa este ultimo comentario es para ya no hacer el circuito que marcas arriba?
Eliminares correcto se puede usar sin transistores ya me funciono, disculpa si es que sigues por aquí como es el programa para mejorar la cantidad de conteos por vuelta crees que me lo puedas pasar
Eliminarentonces pueden ir los canales directo a la tarjeta?
EliminarHola, me podrias propocionar el circuito ya completo, que lo he probado asi como en las imagenes y no me funciona. Gracias.
ResponderEliminarSaludos! Una pregunta, compilé el código y no me marca errores, pero el Monitor Serial únicamente arroja basura. Tampoco me queda muy claro a donde se conecta la patilla 9 PWM de Arduino.
ResponderEliminarDe antemano muchas gracias por el post :D
No entiendo como están conectadas las resistencias que están en la placa, me podría ayudar por favor
ResponderEliminar