Ahora ya tenemos conectados los encoder y motoreductores listos, para controlar los motores se requiere una fuerza superior a la que la tarjeta arduino nos puede entregar, y con fuerza me refiero a corriente, cualquier tarjeta arduino uno es incapaz por sí sola de entregar el voltaje y corriente necesarios, esto se resuelve con el extremadamente popular puente H doble, el módulo L298n.
El L298n es capaz de manejar corrientes superiores a la que se requieren para este proyecto, el funcionamiento, como había dicho antes, es simple, cuando el robot se incline el sensor MPU6050 detectara esta inclinación, a mayor inclinación mayor será la salida PWM del arduino UNO, esta señal es enviada al módulo donde es amplificada para los motores.
La librería PWM.
Todos estamos acostumbrados a trabajar las señales PWM que nos proporciona la tarjeta arduino con la sentencia analogWrite, la frecuencia de la señal por default es de 490 Hz a 980 Hz (dependiendo el pin y/o modelo de tarjeta) pero en aplicaciones que requieren la mayor precisión posible es necesario usar una frecuencia mayor, a mayor frecuencia PWM mejor respuesta en los motores, para eso sirve la librería PWM, esta librería permite establecer una frecuencia personalizada a la señal PWM, en este caso usaremos una frecuencia de 10000 Hz (10 kHz), el código será explicado en una publicación posterior.
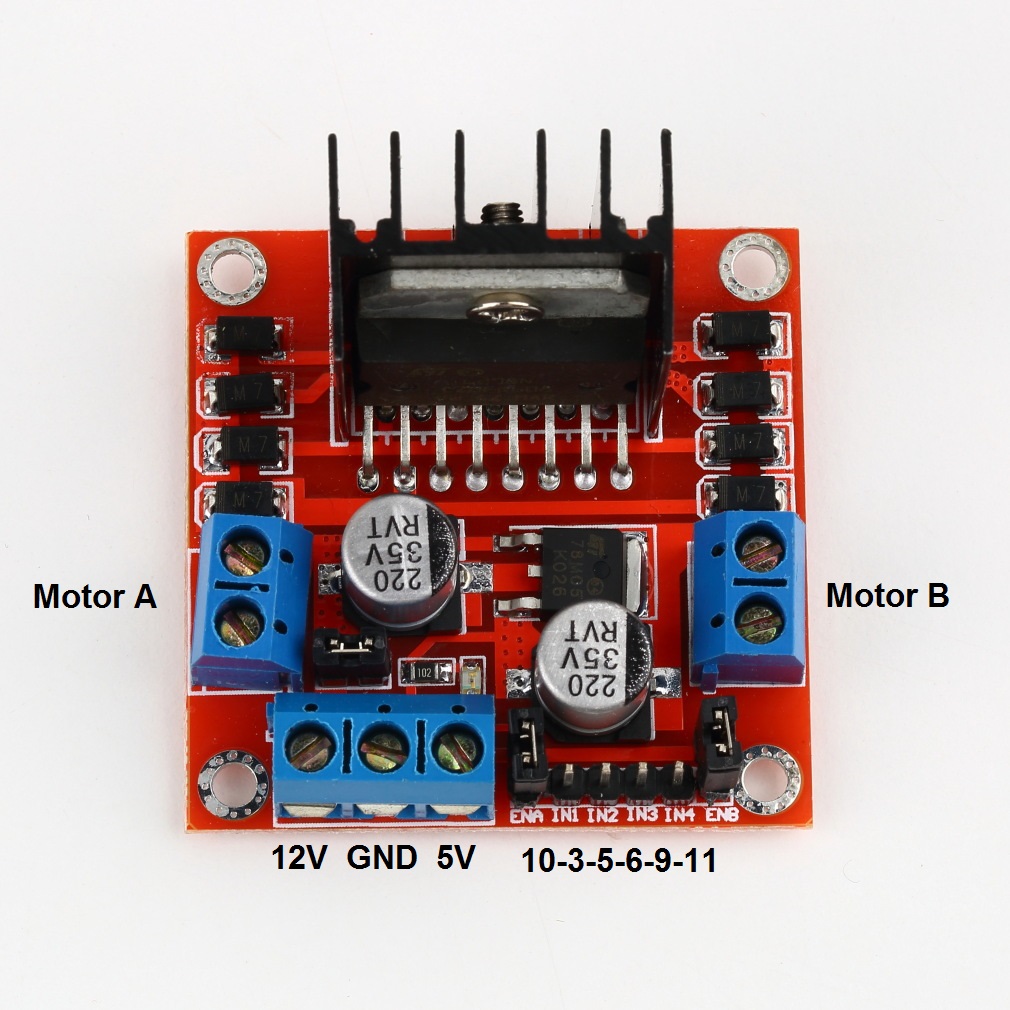
Ahora nuestras conecciones físicas serán las siguientes:

PIN DE ARDUINO L298N
7 IN4
8 IN3
9 ENB
10 ENA
11 IN1
12 IN2
El módulo no recibirá alimentación de 5v. ya que usaremos el jumper para activar el regulador que trae integrado
Hola, muy buen trabajo!
ResponderEliminartengo un problema eh realizado el montage completo pero mis motores no cambian de direccion siempre giran en la misma direccion, se paran cuando depasan los 30 grados y vuelven cuando es menor a 5 grados pero no cambian de direccion, cual puede ser el problema ?